Repository: https://github.com/isaac-for-healthcare/i4h-workflows
End-to-end workflows from simulation to real-world deployment
Isaac for Healthcare - Workflows#
What are Workflows?#
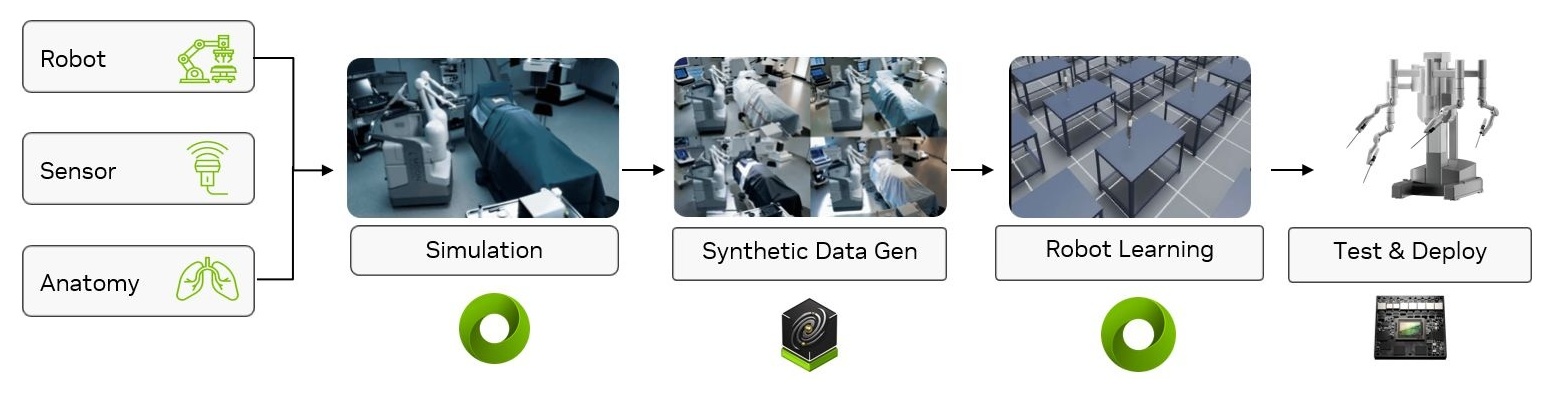
Workflows are comprehensive reference implementations that showcase the complete development pipeline from simulation to real-world deployment. Each workflow includes digital twin environments, AI model training capabilities, and deployment frameworks for specific healthcare robotics applications.
Available Workflows#
Endoluminal Workflow New
GPU-accelerated endovascular catheter and guidewire navigation — fluoroscopy, XPBD rod physics, and patient vasculature digital twin
Agentic Workflow
Unified IsaacLab-Arena + GR00T/openpi workflow with five pre-trained environments — simulation, teleop, training, and deployment
SO-ARM Starter
Surgical assistant robotics with SO-ARM101 manipulator — data collection, policy training, and deployment
Robotic Surgery
Surgical subtask autonomy development workflow
Robotic Ultrasound
End to end autonomous ultrasound scanning development workflow
Telesurgery
Remote surgical operations with low-latency video streaming, haptic feedback, and distributed control
Rheo
Hospital automation development workflow